
全国客服热线:
来源:斯诺克直播网站 发布时间:2024-01-07 14:21:27
行星轮系作为目前先进齿轮传动机构中的一种,具有结构紧密相连、质量轻、承载能力强、传递功率范围大、效率高及寿命长等优点。但其复杂的结构和大量的计算,导致对设计人员的水平有一定的,如果设计或制造不当,会使行星齿轮的传动精度受到一定的影响,导致传动过程产生一定的振动和噪声。通常情况下,有以下几方面影响传动系统的噪声:
1)设计时,由于行星轮系参数选择不当,导致齿轮副重合度过小;轮齿修形方式不当或没有修形;齿轮箱的结构设计不合理等。
2)轮齿加工时,由于基节误差或齿形误差过大,导致齿侧间隙过大;加工表面粗糙度偏大等。
3)轮系装配时,由于轴的平行度差或回转精度不高,轴或轴承的刚度不足等,导致轮系精度降低。
4)另外,输入扭矩、负载扭矩的波动及轴系的扭振等也会使传动系统产生一定的噪声。
针对齿轮副传动过程中过大的传递误差和一定的载荷偏载导致的噪声问题,常用方法就是对齿轮产生冲击的部分进行修形,使其接触部分面积增大,冲击减小。恰当的修形量,有利于提高齿轮的弹性,从而进一步改善齿轮的啮合性能,减小振动和噪声。
对齿轮修形时一般会根据经验修形,即先加工出齿面,再进行接触斑点实验,得到不同工况下的齿面接触斑点,然后根据得到的接触斑点对轮齿进行修形。这种方法显然要进行多次的修形实验来确定最优的修形方式,导致成本大且时间长。而本文利用KISSsoft软件可以很好地模拟这些实验过程,通过不同的修形方式及组合,来得到最佳的齿轮副啮合的传动误差、齿面载荷分布以及接触斑点,以实现行星减速机的降噪目的。相比传统方法,利用该软件可以轻松又有效地节省加工成本并缩短设计周期。
一般来说,齿轮修形分为齿廓修形和齿向修形,具体如图1和图2所示。齿向修形主要是针对降低齿面载荷分布和减轻齿面偏载以提高齿轮承载能力,而齿廓修形主要是降低齿轮副啮合冲击由此减少噪声。
理论意义上,具有精确的渐开线的刚性齿轮可以在一定程度上完成啮合过程中主、从动轮的基节处处相等。但实际中,在一定齿轮副啮合力作用,作为弹性体的齿轮副会产生相应的弹性变形,使处于啮合线位置的主、从动轮的基节出现变化,不再相等。
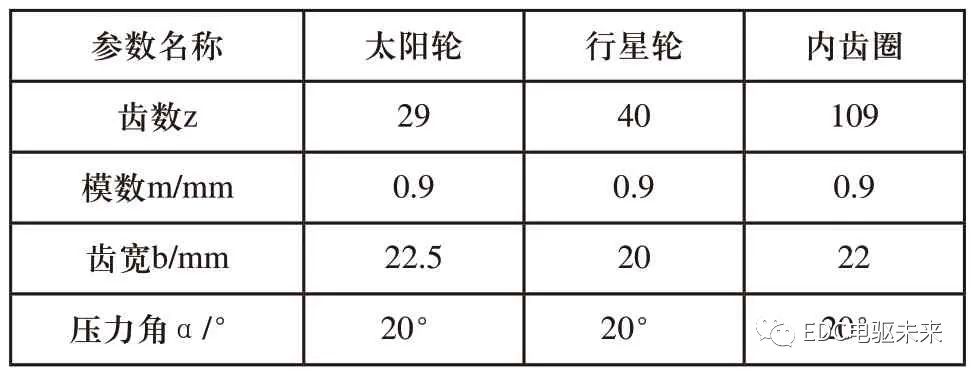
如图3所示,当齿对2进入啮入位置时,由于齿对1的弹性变形,使主动轮基节Pb1小于从动轮基节Pb2,齿轮啮入点的啮合力瞬间变大,形成了啮入冲击。同样的,当齿对1快要脱离啮合接触时,由于齿对2的弹性变形,使得主动轮基节Pb1大于从动轮基节Pb2,导致主动轮的齿顶沿着被动轮的齿根刮行,形成啮出冲击,如图4所示。为降低基节误差和减小齿轮受载弹性变形所导致的啮入冲击和啮出冲击,通常从齿高方向向下切除一部分材料,改变齿廓形状,即齿廓修形,以消除齿轮副在啮入和啮出位置的几何干涉。
式中,∆max为最大修形量,ξa为端面重合度,KA为工况系数,Ft/b为单位齿宽上的圆周力,
式中,Cc、Ca为修形量,Fm为作用在齿宽面上的圆周力,b为齿面宽度,fg为齿向误差,FβXCV为啮合齿向误差。
但是,无论齿廓修形还是齿向修形都是在特有的经验背景下进行修形的,因此并不适用所有的场合,而不恰当的修形,反而会促进降低齿轮传动性能,达不到预期的效果。
Kisssoft软件对齿轮修形时,应用鼓形、线形、抛物线和螺旋角等不同修形方法或其组合,通过对齿轮进行齿廓、齿向或对角修形,从而得到合理的修形方式,达到最优修形效果。在Kisssoft软件完成修形之后,可分析齿轮强度在修形前后的变化来判断修形的好坏,同时也可以直观比较齿轮传递误差和接触斑点的变化作为参考。本节利用Kisssoft软件,通过不同的修形方式及组合的对比分析,得出一种最佳的修形方式。
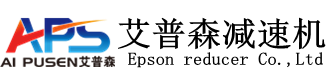
以某行星齿轮减速机为例,该轮系以太阳轮作为输入,行星架为输出,额定输出力矩为330Nm;额定输入转速为3000rpm。齿轮参数如表1所示。
根据表1中的参数,在SolidWorks软件中建立精确模型后导入Kisssoft软件中,具体三维模型如图5所示。

对其运动进行仿真,得到行星轮与太阳轮、行星轮与内齿圈的轮齿啮合图,如图6和图7所示。通过仿真分析可看出轮齿在啮合过程中无干涉。

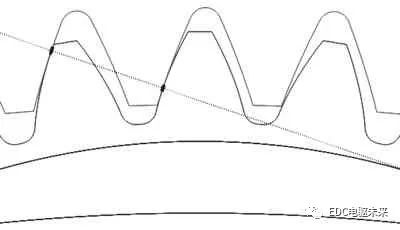
图6 太阳轮和行星轮运动仿线 行星轮与内齿圈运动仿线时,齿轮传动的噪音越低。经分析,行星轮与太阳轮、行星轮与内齿圈的滑动比均在-1与1内,如图8和图9所示,从图中能够准确的看出行星轮与内齿圈滑动比接近0,证明其工作状态良好。
由于行星轮既与太阳轮啮合又和内齿圈啮合,所以一般只需对行星轮进行修形,其他齿轮不修形。利用Kisssoft软件,对某行星减速器的行星轮分别在齿顶、齿根以及齿顶和齿根等位置做短齿廓、长齿廓、短圆弧、长圆弧、短渐开线、长渐开线、短齿廓圆弧过渡和长齿廓圆弧过渡等修形方式分析(限于篇幅,仅列出最优一组修行量数据,如表2所示)。修行量计算如下:
距,a为齿轮副啮合压力角,Q为单位齿宽上的作用力,b为齿宽,T为扭矩,P为功率,n为转速,B1B2为齿轮副有效啮合长度,Pb为基节,m为模数。
为了清晰了解同一位置不同修形方式和不同位置同一修形方式对传递误差、最向刚度、最大切向刚度以及最大应力的影响,采用图形化方式来进行比较,具体如图10~图13所示。
图13中,横坐标1-9分别代表不同的修形方式,即1-短齿廓、2-长齿廓、3-短圆弧、4-长圆弧、5-短渐开线-长齿廓圆弧过渡。

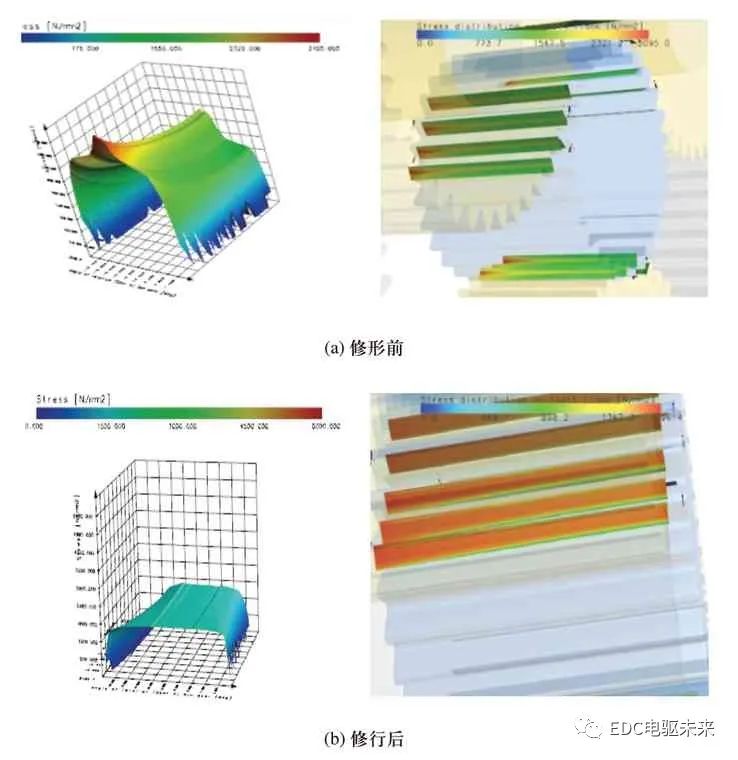
长齿廓修形较短齿廓修形效果更好,同时对齿顶和齿根一起进行修形时其传递误差、最大应力以及最向刚度最低。其中,又以齿顶和齿根进行长圆弧修形时效果最佳,噪音最低。如图14~图16所示,这种修形方式下,传递误差由初始的1.847μm减小至1.192μm,降低了35.5%;未修形前的法向刚度365.8582N/μm,切向刚度为30.3627N/μm,修行后法向刚度降为343.8746N/μm,切向刚度降为30.3092N/μm;未修形前齿面载荷沿齿宽方向分布不均,存在一定的偏载现象,最大载荷为1335.547N/mm2,修行后齿面载荷沿齿宽方向分布均匀、基本不存在偏载现象,最大载荷为1129.163N/mm2。
本文在SolidWorks软件中建立了渐开线变位直齿轮行星轮系的精确模型,之后导入Kisssoft软件中进行仿真分析,通过不同修形方法及组合,分析修形前后行星轮系的传递误差、齿面载荷分布及接触斑点,得到最优的修形方法。通过对某型号的行星减速机的仿真分析,得出当对行星轮系的行星轮进行齿顶和齿根长圆弧修形时效果最好,其传递误差、最大载荷及接触斑点都得到相应的降低和优化,达到了减振、降噪的目的。因此,利用Kisssoft软件对齿轮修形时,可大幅度的提升齿轮修形的设计效率、减少设计周期。


1、关于齿圈的固定,能够使用制动器实现接合与分离,也能够使用直接固定的方式;

的传递功率及转矩要远大于别的形式,而且可靠性高。4、结构变异及扩展功能多由于
结构类型的多样化,因而使得其设计应用具有更达的灵活性和扩展功能,如利用
允许时,增加齿宽,能够大大减少恒定扭矩下的单位负荷。降低轮齿挠曲,减少噪声激励,从而降低
的内部动态激励或外部激励,其振动是不可避免的。振动造成的后果不仅包括骚扰的噪声辐射,还会包括严重的磨损甚至损坏。
与仿真 /
的发展,人们对汽车的要求慢慢的升高。为了追求汽车的经济性、动力性、安全性和舒适性,世界各国不断运
,来实现榨汁功能,挤压转速越低越好,厂家在设计原汁机时追求的是静音式、能完整保留食物中含有生命力的活营养素,所以要求电机的转速低、效率高。原汁机电机采用的是
方式,通常是为帮助装配,和机械设计中多数倒角的作用是一样的,但其实对
方式的原理解析 /
TE仿真分析中的应用 /
共射电路遇上模拟开关,可变放大倍数,原来如此简单#硬件设计遇到过哪些坑?
#硬声新人计划 是德科技 keysight DSOX 1202A 示波器 开箱(8)#仪器与仪表