
全国客服热线:

来源:斯诺克直播网站 发布时间:2024-03-09 16:03:01
电液伺服阀由于其高精度和快速控制能力,除了航空航天和军事装备广泛使用的领域外,在机床、塑料、轧钢机、车辆等各种工业设施的开环或闭环的电液控制管理系统中。特别是系统要求高的动态响应、大的输出功率的场合获得了广泛应用。
(1)电液伺服阀的位置控制回路。图172所示为电液伺服阀控制的液压缸直线 (a)所示为其原理图,图172 (b)所示为其职能方框图。当系统由指令电位器输入指令信号后,电液伺服阀2的电气机械转换器动作,通过液压放大器(先导级和功率级)将能量转换放大后,液压源的压力油经电液伺服阀向液压缸3供油,驱动负载到预定位置,反馈电位器(位置传感器)检测到的反馈信号与输入指令信号经伺服放大器1比较,使执行器精度运动在所需位置上。
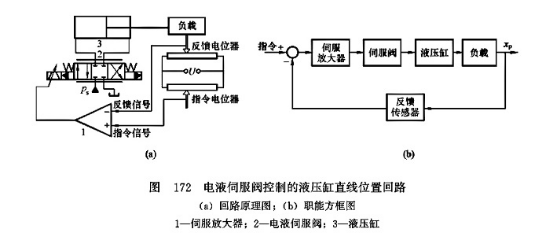
图173所示为电液伺服阀控制的液压马达直线 (a)所示为其原理图,图173 (b)所示为其职能方框图。当系统输入指令信号后,由能量转换放大,液压源的压力油经电液伺服阀2向液压马达3供油,齿轮减速器4和丝杠螺母机构5将马达的回转运动转换为负载的直线运动,位置传感器检验测试到的反馈信号与输入指令信号经伺服放大器1比较,使负载精度运动在所需位置上。
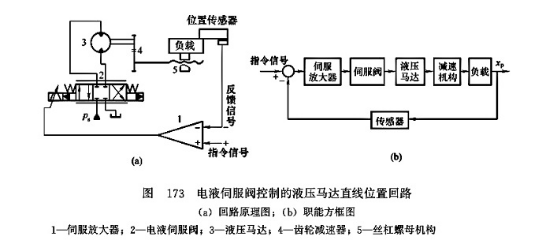
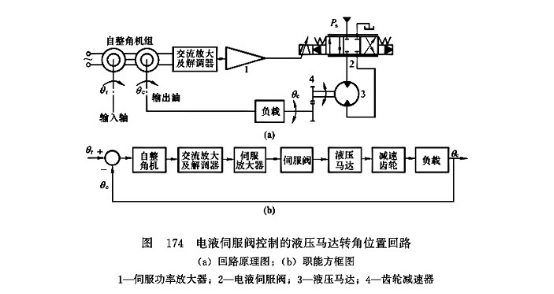
图174所示为电液伺服阀控制的液压马达转角位置回路,图174 (a)所示为其原理图,图174 (b)所示为其职能方框图。它采用白整角机组作为角差测量装置(3根线表示定子绕组的引出线根线表示转子绕组的引出线,通过圆心的点画线表示转轴),输入轴与发送机轴相连,输出轴与接收机相连。自整角机组检测输入轴和输出轴之间的角插,并将角差转换为振幅调制渡电压信号,经交流放大器放大和解调器解调后,将交流电压信号转换为直流电压信号,再经伺服功率放大器l放大,产生一个差动电流去控制电液伺服阀2,液压能量放大后,液压源的压力油经电液伺服阀2向液压马达3供油,马达通过齿轮减速器4驱动负载作回转运动,经上述反馈信号与输入指令信号的比较,使负载精确运动在所需转角位置上。
(2)电液伺服阀的速度控制回路。图175所示为利用电液伺服阀控制双向定量液压马达回转速度保持一定值的回路,图175 (a)所示为其原理图,图175 (b)所示为其职能方框图。当系统输入指令信号后,电液伺服阀2的电气机械转换器动作,通过液压放大器(先导级和功率级)将能量转换放大后,液压源的压力油经电液伺服阀向双向液压马达3供油,使液压马达驱动负载以一定转速工作;同时,测速电动机(速度传感器)4的检测反馈信号uf与输入指令信号经伺服放大器1比较,得到的误差信号控制电液伺服阀的阀口开度,从而使执行器转速保持在设定值附近。
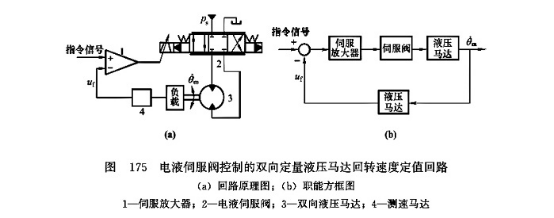
图176所示为开环变量泵控制的液压马达速度回路,图176 (a)所示为其原理图,图176 (b)所示为其职能方框图。双向变量液压泵5、双向定量液压马达6及安全溢流阀组7和补油单向阀组8组成闭式油路,通过改变变量泵5的排量对液压马达6调速。而变量泵的排量调节通过电液伺服阀2控制的双杆液压缸3的位移调节来实现。执行元件及负载与电液伺服闷控制的液压缸之间是开环的。当系统输人指令信号后,控制液压源的压力油经电液伺服阀2向双杆液压缸3供油,使液压缸驱动变量泵的变量机构在一定位置下工作;同时,位置传感器4的检测反馈信号与输入指令信号经伺服放大器1比较,得出的误差信号控制电液伺服阀的阀口开度,从而使变量泵的变量机构即变量泵的排量保持在设定值附近,最终保证液压马达6在希望的转速值附近工作。
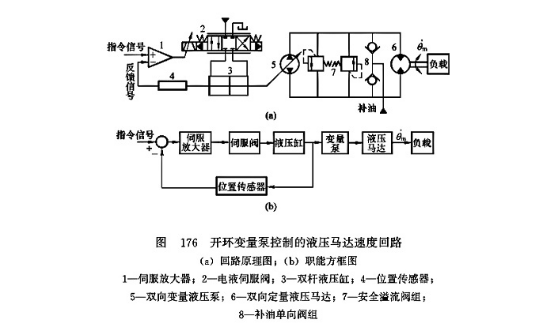
图177所示为闭环变量泵控制的液压马达速度回路,图177 (a)所示为其原理图,图177 (b)所示为其职能方框图。其中油路结构与图176所示开环变量泵控制的液压马达速度回路基本相同,所不同的是在负载与指令机构间增设了测速电动机(速度传感器)9,从而构成一个闭环速度控制回路。因此其速度控制精度更高。

(3)电液伺服阀的力和压力控制回路。图178 (a)所示为电液伺服阀的力控制回路.油源经电液伺服阀2向双杆液压缸3供油,液压缸产生的作用力施加在负载上,力传感器4的检测反馈信号与输人指令信号经伺服放大器1比较,再通过电液伺服阀控制缸的动作,从而保持负载受力的基本恒定。图178(b)所示为维持双杆液压缸两腔压力差恒定的控制回路,当电液伺服阀2接受输入指令信号并将信号转换放大后,使双杆液压缸3两腔压力差达到某一设定值。缸内压力变化时,液压缸近旁所控制的压差传感器5的检测反馈信号与输人信号指令经伺服放大器1比较,再通过电液伺服阀控制缸的动作,从而保持液压缸两腔压差的基本恒定。图178(c)所示为电液伺服阀的力和压力控制回路的职能方框图。
(4)电液伺服阀的液压缸同步控制回路。图179所示为利用电液伺服阀放油的液压缸同步控制回路。分流阀6用于粗略同步控制,再用电液伺服阀5根据位置误差检测器(差动变压器)3的反馈信号进行旁路放油,实现精确的同步控制。该回路同步精度高(达0.2mm),可自行消除两缸位置误差;伺服阀发生故障时仍可实现粗略同步。伺服阀可采用小流量阀实现放油,但成本比较高,效率较低,适用于同步精度要求比较高的场合。
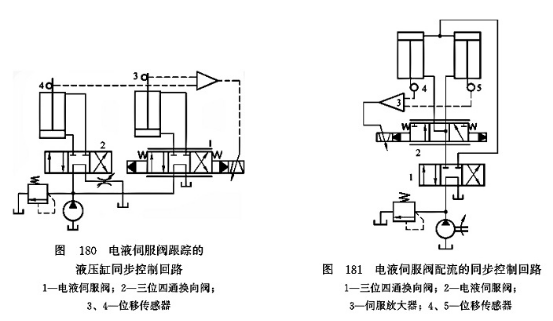
图180所示为利用电液伺服阀跟踪的液压缸同步控制回路。电液伺服阀1控制阀口开度,输出一个与换向阀2相同的流量,使两个液压缸获得双向同步运动。该回路同步精度高,但价格较贵。适用于两液压缸相隔较远,有要求同步精度很高的场合。
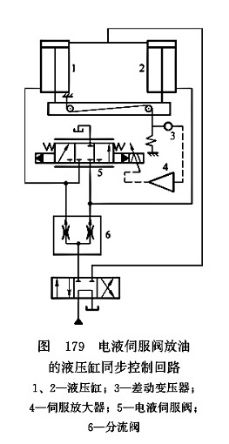
图181所示为利用电液伺服阀配流的同步控制回路。电液伺服阀2根据位移传感器4和5的反馈信号持续地调整阀口开度,控制两个液压缸的输人或输出流量,使它们获得双向同步运动。该回路的特点与图175所示回路相同。
调整:将新更换的部件来安装,接着进行调整,确保电液伺服阀的动作和压力等参数符合要求。
在进行电液伺服阀维修操作前,需要对操作的人进行安全培训和液压系统的排空、排气工作。同时,需要用符合相关规定的工具和材料,避免损坏电液伺服阀和液压系统。
伴随着人工智能、物联网与大数据等信息技术的深层次地融合与发展,在汽车与交通出行领域也正在发生着翻天覆地的变化,智能网联汽车及无人驾驶已成为未来汽车的发展趋势,并将对道路交互与通行产生革命性影响。近几年,随着 自动驾驶 领域的激烈竞争,相关产业链企业已开始投入大量人员和资金进行研发技术,推动无人驾驶发展水准不断提升。 高精度地图是无人驾驶的必经之路 在无人驾驶的道路环境中,车道、车距、路障等信息的处理是无人驾驶技术的基础,由于无人驾驶技术对于道路信息的高依赖程度,就需要更加精确的位置信息。如果说传感器能给无人驾驶车辆提供直观的环境印象,那么,高精度地图则能够最终靠车辆精准定位,将车辆准确的在动态变化的复杂立体交通环境中进行还原。因此
摘要:磁场测量常常要很高的精度。把内置微控制器的高速高精度16位A/D转换器AD676应用在测磁设备中,很好地满足了磁场测量的精度要求。 1 AD676的结构特点 在对舰船磁场的测量过程中,由于舰船的运动姿态一直在变化,使舰船磁场投影到各分量的强度也一直在变化。为实现对舰船磁场的动态测量,因此,磁场测量必须快速而准确。选用87C51单片机扩展内置微控制器的高速16位A/D转换器AD676能很好地满足这一要求。 AD676的内部结构如图1所示。由两个单片部分所组成,即数字控制单片和模拟ADC单片。数字控制单片是用DXPCMOS工艺制造,而模拟ADC单片是用BIMOSⅡ工艺制造的。该器件是使用逐次逼近技术来实现A/D
A/D在测磁设备中的应用 /
0 引言 在工业生产和日常生活中,温度是需要测量和控制的重要参数之一,物体的许多物理现象和化学性质都与温度有关,许多生产的全部过程都是在一定的温度范围内进行的,需要测量和控制温度,因此温度测量的场合极其广泛。热电阻是工程上应用广泛的温度传感器,使用最多的铂热电阻 温度传感器 零摄氏度标称中阻值为100Ω和10Ω,电阻变化系数为0.003851。 铂热电阻 温度传感器精度高、稳定性高,应用温度范围广,是中低温区最常用的一种温度传感器,不仅大范围的使用在工业测温,而且被制作成各种标准温度计供计量和校准使用。 该装置结合单片机和传感器技术,采用AD517及ADSlllO芯片和EL-700铂热电阻设计了一种具有无线发射与接收模块的高精度测温
测温装置 /
1 、引言 牛奶在人们的生活饮食中越来越普遍,实时快速准确的检测牛奶成份对提高牛奶质量和对实现乳业生产的全部过程的自动化管理有重要意义。检测牛奶成份的方法有多种,化学分析方法仍然是准确度最高的检测验证的方法,但是他很难适应短时间测试的需要,物理仪器测试法主要有利用超声波原理和光谱分析检测,目前国外的技术相对来说还是比较成熟,但仪器昂贵,不可能在中国普及,特别不可能在中小企业和乳牛场使用。本文介绍的牛奶成份测仪采取了激光散透比来检测,精度比较准确、成本较低。 2、 检测原理 激光散透比检测即用激光的入射平内同时90°处的散射光光强Is和检测0°处的透射光光强It的比值来表征测试牛乳蛋白质含量的光学参量。但是由于牛乳中存在两种散射大分子,所以很难准确地
据外媒报道,智能车停创新公司IPS集团(IPS Group)推出立体车辆检测传感器(Stereoscopic Vehicle Detection Sensor),加强完善完全集成的智能停车ECO(Fully Integrated Smart Parking Ecosystem)。 图片来自:IPS集团 这些传感器与IPS Single-Space Parking Meters集成,以检测空间空置和占用情况。 停车管理人能实时监控空间占用情况,以制定数据驱动的策略决策,例如基于需求的费率、停车时间表和执行流程。
立体车辆检测传感器 /
随着社会的发展,人们的生活也慢慢的变多姿多彩了。机器人摊煎饼、挖掘机投篮等等一系列让我们以前很难想到的事情就清晰地展现在我们眼前。五月份即将开幕的华家班汽车杂技表演,更是万众期待。汽车杂技相比于赛车可以说不相伯仲,考验技术的同时,更加看重的是“控制能力”,例如“汽车芭蕾舞”,当多辆汽车以一种曲线的形式通过路障时,我不得不惊叹,这真的是“汽车”所反映出来的,若是其中一辆车行驶过快或是过慢,都可能会降低整体的视觉效果,严重的人甚至发生追尾事故,因此精确的控制就显得很重要。 对于汽车来讲速度和力的控制体现了电机控制精度的高低,电机控制精度最重要的包含转矩控制精度、转速控制精度。在GBT 18488.2-2015 电动汽车用驱动电机系统标准
引言 近年来,随着光电技术的迅猛发展,激光器已大范围的应用于医疗、国防、测量等所有的领域。而环境和温度变化会直接影响激光器的波长。把关键元件(如高性能晶振、SAW 滤波器、光放大器、激光二极管) 的本机温度限制在窄范围内,能大大的提升电子系统的精度。通常要将温度控制在0. 1 ℃内,激光器的工作精度才能很好地保持在0. 1nm 内 。文中的设计的具体方案能为大功率半导体激光器提供有效支持,最大电流可达2. 5A。 1 半导体激光控制器的设计 激光控制器由受控恒流源,温度监视及控制电路,主控制器及显示器构成。整体结构原理见图1。 1. 1 受控恒流源: 为了使激光器输出稳定的激光,对流过激光器的电流要求非常严格
的设计方案 /
据麦姆斯咨询报道,近期,无锡凌思 科技 有限公司(简称:凌思科技)宣布其开发的IMU500 高精度 汽车级 MEMS 惯性测量单元(IMU)已开始批量生产。 随着 新能源 汽车和 无人驾驶 的发展,GNSS和IMU逐渐成为了刚需。惯性导航起源于军工领域,在国防和商用航天航空领域已经常使用,有自主导航、不受外部依赖、输出频率高(大于 100Hz)等优点。定位精度取决于 陀螺仪 、加速度计等惯性 传感器 的测量精度,但是,传统高精度惯性导航模组器件一般价格昂贵,且与民用车辆所需的技术路线不同。MEMS惯性导航具有价格低、功耗低、体积小、可靠性高和环境适应能力强等特点,推动了惯性导航在民用领域的发展。 产品 介绍 “IMU5
系统设计指南 (埃利斯)
射频调制激光雷达
有奖征文:邀一线汽车VCU/MCU开发工程师,分享开发经验、难题、成长之路等
MPS电机研究院 让电机更听话的秘密! 第一站:电机应用知识大考!第三期考题上线,跟帖赢好礼~
兆易创新推出GD32F5系列Cortex®-M33内核MCU,提供工业高性能应用新选择
中国北京(2024年3月7日) 业界领先的半导体器件供应商兆易创新GigaDevice(股票代码 603986)今日宣布,正式推出基于Arm® Cortex ...
IAR Embedded Workbench for Arm已全面支持小华半导体系列芯片,加速高端工控MCU和车用MCU应用的安全开发中国,上海 – 2024年3月7日 ...
LED显示屏灰度是LED显示屏的重要参数之一,LED显示屏灰度就是LED的色阶或灰阶,是指LED显示屏亮度的明暗程度,LED显示屏灰度等级是指LED显 ...
一、简介超声换能器(UltrasonicTransducer,UT)是指在超声波频率范围内实现声能与电能相互转换的器件,根据换能工作状态大致上可以分为三种类型 ...
Spartan 6、7系列即将被取代:AMD推出16nm的第六代Spartan UltraScale+
日前,AMD推出全新的Spartan UltraScale+系列,作为第六代Spartan FPGA产品,它依然延续Spartan的低成本、低功耗优势,并取代了Spartan 6和Spartan 7系列。...
如何在两部SDR接收器之间远程遥控切换天线款制冷系统原理的动态图解 制冷系统原理图的重要作用

嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科
